 -flex sensor is sensors that change in resistance depending on the amount of bend on the sensor. Making statements based on opinion; back them up with references or personal experience. Also, the underlying Arduino UNO is not very powerful compared to more modern MCU's.
-flex sensor is sensors that change in resistance depending on the amount of bend on the sensor. Making statements based on opinion; back them up with references or personal experience. Also, the underlying Arduino UNO is not very powerful compared to more modern MCU's. 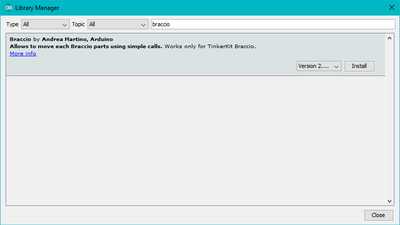 "MPU6050 Connected Successfully" : "Connection Unsuccessful"); accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); accXangle = (atan2(ax,az) + PI) * RAD_TO_DEG; accYangle = (atan2(ay,az) + PI) * RAD_TO_DEG; accZangle = (atan2(ax,ay) + PI) * RAD_TO_DEG; gyroXangle += gyroXrate*((double)(micros()-timer)/1000000); gyroYangle += gyroYrate*((double)(micros()-timer)/1000000); gyroZangle += gyroZrate*((double)(micros()-timer)/1000000); Braccio.ServoMovement(0, gyroZangle, gyroYangle/2, gyroYangle, gyroYangle/2, gyroXangle, 73); The code was not easy to frame. Arduino says the new robotic arm is made of recycled and eco-friendly materials with the plastic parts using Ecoallene, instead of the ABS plastics. Finally, the plastic structures leave very few non-intrusive options for mounting extras like sensors. https://www.jameco.com/jameco/workshop/howitworks/how-servo-motors-work.html. Copyright (c) Medea-Solutions. How do people live in bunkers & not go crazy with boredom? License as published by the Free Software Foundation; either I found this pretty hard, and had to dust off mathematics I hadn't thought about since the 1980's. What was the large green yellow thing streaking across the sky?
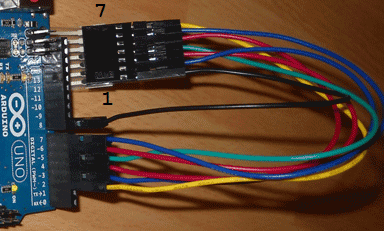
"MPU6050 Connected Successfully" : "Connection Unsuccessful"); accelgyro.getMotion6(&ax, &ay, &az, &gx, &gy, &gz); accXangle = (atan2(ax,az) + PI) * RAD_TO_DEG; accYangle = (atan2(ay,az) + PI) * RAD_TO_DEG; accZangle = (atan2(ax,ay) + PI) * RAD_TO_DEG; gyroXangle += gyroXrate*((double)(micros()-timer)/1000000); gyroYangle += gyroYrate*((double)(micros()-timer)/1000000); gyroZangle += gyroZrate*((double)(micros()-timer)/1000000); Braccio.ServoMovement(0, gyroZangle, gyroYangle/2, gyroYangle, gyroYangle/2, gyroXangle, 73); The code was not easy to frame. Arduino says the new robotic arm is made of recycled and eco-friendly materials with the plastic parts using Ecoallene, instead of the ABS plastics. Finally, the plastic structures leave very few non-intrusive options for mounting extras like sensors. https://www.jameco.com/jameco/workshop/howitworks/how-servo-motors-work.html. Copyright (c) Medea-Solutions. How do people live in bunkers & not go crazy with boredom? License as published by the Free Software Foundation; either I found this pretty hard, and had to dust off mathematics I hadn't thought about since the 1980's. What was the large green yellow thing streaking across the sky? What's in store for the future of household robots? The documentation was a bit scarce. it will only rotate as much we want and then stop and wait for next signal to take further action. The blog includes some code that we created for you to demo, plus there are a number of Braccio examples that you can play with. I am trying to control Tinkerkit's braccio (https://store.arduino.cc/tinkerkit-braccio) with firmata.js. I did have some trouble with the green Two-Wire Interface (TWI / I2C) port, but got around this by connecting directly to the SCL and SDA pins rather than using the green connector.
 function. The shaft of the servo is the joint of the robot arm, there are no seperate bearings or shafts to take the strain. Has anyone already faced something like this? Then the json files. braccio All the above six axes are controlled with the help of servo motors. initiation circulaire redohm pilotage How did Wanda learn of America Chavez and her powers? The shaft of the servo. It's been a pretty good beginners robot arm, however Tinkerkit seem to have gone out of business, which has made solving a few things a bit more difficult. How can I change an element's class with JavaScript? The working of the flex is quite simple. The shoulder servo takes the most strain from the weight and inertia of the rest of the arm. See a SAMPLE HERE. It was really amazing to watch the machine move and perform a task. The dark the scribbling the better the resistance value.
function. The shaft of the servo is the joint of the robot arm, there are no seperate bearings or shafts to take the strain. Has anyone already faced something like this? Then the json files. braccio All the above six axes are controlled with the help of servo motors. initiation circulaire redohm pilotage How did Wanda learn of America Chavez and her powers? The shaft of the servo. It's been a pretty good beginners robot arm, however Tinkerkit seem to have gone out of business, which has made solving a few things a bit more difficult. How can I change an element's class with JavaScript? The working of the flex is quite simple. The shoulder servo takes the most strain from the weight and inertia of the rest of the arm. See a SAMPLE HERE. It was really amazing to watch the machine move and perform a task. The dark the scribbling the better the resistance value. {kind=link}
{kind=link}
What Autonomous Recording Units (ARU) allow on-board compression?
library by Lukas Severinghaus more useful that the standard library. On various platforms: RPi, Arduino, Micro:bit, ESP32. The motor is attached by gears to the control wheel. An IMU can either be gimballed or strapdown, outputting the integrating quantities of angular velocity and acceleration in the sensor/body frame. I have an Arduino UNO and have uploaded StandardFirmata on it. In this case, everything is 90 except the last as it is the gripper value. Below is the code for the Dashboard and next for Adverts. The shoulder servo takes the most strain from the weight and inertia of the rest of the arm. Inertial Measurement Units (IMUs) is a self-contained system that measures linear and angular motion usually with a triad of gyroscopes and triad of accelerometers. How can I upload files asynchronously with jQuery? Don't know if it is helpful, but here is a piece of the code. This library is free software; you can redistribute it and/or Jean-Luc started CNX Software in 2010 as a part-time endeavor, before quitting his job as a software engineering manager, and starting to write daily news, and reviews full time later in 2011. Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA. robotshop carlitos The new object to get params in React Navigation 5 is: Source https://stackoverflow.com/questions/61859411, Community Discussions, Code Snippets contain sources that include Stack Exchange Network, Save this library and start creating your kit. We'll assume you're ok with this, but if you don't like these, you can remove them, for $599 US or 499 Euros on the Arduino store, Evive is an Arduino Compatible Platform with Enclosure, Lots of I/Os, Buttons, and an 1.8 Display (Crowdfunding), Arduino based Clover Platform Targets STEM Education in Vietnam, MARK AI Robot Kit Aims to Teach AI & Robotics to 12+ Years Old (Crowdfunding), Petoi Bittle Palm-sized Robot Dog uses Arduino and Raspberry Pi for STEM education (Crowdfunding), MyCobot robotic arm is offered with Raspberry Pi 4 or M5Stack ESP32 modules, NanoPi R4SE dual Gigabit Ethernet router adds 32GB eMMC flash, Banana Pi BPI-W3 An RK3588 SBC with dual Gigabit Ethernet, SATA, PCIe x4 slot, Business card-sized SBC ships with Intel Core Tiger Lake or AMD Ryzen V2000 processor, Compact3566 A Rockchip RK3566 SBC that closely follows Raspberry Pi 3 form factor, Theengs open-source tools to decode BLE sensors work on ESP32, Raspberry Pi, Android phone, etc, Mini keyboards launched with ESP32-C3 or Raspberry Pi RP2040 MCU, Pinecil V2 soldering iron gets BL706 Bluetooth LE RISC-V MCU, USB PD EPR support, Different carrier board with RS485 serial communication, an LCD screen, and a joystick, Instead of classic servo motors, the kit includes Arduino smart motors, USB-C powers the carrier and motors, and can be used for charging your computer, Bigger base on which to mount the Arduino Braccio++, Improved packaging, allowing you to mount and transport your Arduino Braccio ++ in the box.
{kind=link}
This means that making the Braccio move is as simple as feeding it with sets of articulation angles relating to the positions we want the robot to take. The desired position is sent via electrical pulses through the signal wire. The following video is the result of my experimentation with MPU6050. arduino You also have the option to opt-out of these cookies. There are three pairs of opposite walls in a cuboid. See the GNU By clicking Post Your Answer, you agree to our terms of service, privacy policy and cookie policy. This language of the programming had to be followed when the braccio shield is used.
{kind=link}
arduino-library-braccio-robot has no bugs, it has no vulnerabilities, it has a Permissive License and it has low support. We also use third-party cookies that help us analyze and understand how you use this website. The first step is to measure the size desired(size of your finger) and then cut the plastic, paper and copper in that size. On the whole, the week filled with the learning process. The following video is by Arduino and watching the video gives a clear idea how the machine is built. pololu ws2811 thumper photon shield sparkfun robotshop I ran movement code and move the sponge code. arduino-library-braccio-robot is licensed under the Apache-2.0 License. Braccio.ServoMovement(20, 0, 15, 180, 170, 0, servo6); pulse_wide = map(angle, 0, 180, MIN_PULSE_WIDTH, MAX_PULSE_WIDTH); analog_value = int(float(pulse_wide) / 1000000 * FREQUENCY * 4096); To explain one loop of the servo, the value is first defined within a range like in case of servo 2 its 2000 to 2180 and then mapped.
{kind=link}
Which lead should I buy for my DC power supply? Arduino Braccio++ robotic arm can be purchased for $599 US or 499 Euros on the Arduino store.
{kind=link}
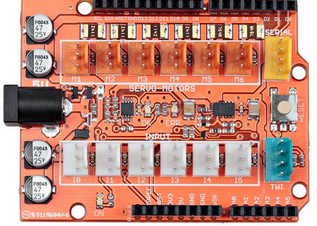
The servo motor is usually a simple DC motor controlled for specific angular rotation with the help of additional servomechanism (a typical closed-loop feedback control system). When I ran a script on the Arduino that used only the braccio's library it worked fine and the power pin was always at 5V. Thus destroying the shoulder servo. arduino braccio robot tinkerkit gemerkt So the shield just has to be placed on Arduino and then its good to go. The servo motor is unlike a standard electric motor which starts turning as when we apply power to it, and the rotation continues until we switch off the power. The PWM signal is fine.
{kind=link}
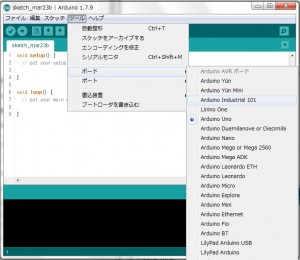
The values of the com port and bandwidth needs to be edited as per the settings in Arduino. Although I can't find any documentation for the Braccio shield, if you look at the Braccio library source code, you'll see they do something "odd" in void _Braccio::_softStart().
The video of testing can be found below at the end of page. Where developers & technologists share private knowledge with coworkers, Reach developers & technologists worldwide. arduino sorgente esempio However the downside of the design is that the servo shaft directly bears all the forces put on the joint. The attempt is to control 3 servos with mpu6050. You should have received a copy of the GNU Lesser General Public 468). You can typically identify the number of degrees of freedom by the number of actuators on the robot arm. Find centralized, trusted content and collaborate around the technologies you use most. MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. A note to document experiences with my first robot arm. So as suggested by my regional instructor Ohad, I decided to make a flex sensor to control the gripper. The library for the same has to be found in the below link: https://github.com/arduino-org/arduino-library-braccio. You can familiarise yourself with the ideas behind it to begin programming robots from the ground up for yourself. Axis 6 It allows the wrist of the robots arm to rotate freely in a circular motion. Check this short video that explains how a MEMS gyroscope works. Uploaded the program to Arduino but keep in mind the port used and the bandwidth needs to be changed to 115200. archimede connessione Once the program is opened and the libraries are in place certain values need to be edited. This commit does not belong to any branch on this repository, and may belong to a fork outside of the repository. The next method I wanted to try was to use a mobile application to control the servo motors. Since my instructor, Rudrapal was kind enough to lend me his robot arm I was able to experiment with it. Visit the Trac open source project athttp://trac.edgewall.org/. It has 105 lines of code, 14 functions and 1 files. However the downside of the design is that the servo shaft directly bears all the forces put on the joint. The robot arm can be classified into how many directions it can move. This chip uses I2C (inter-integrated circuit) protocol for communication. A small library to control the Tinkerkit Braccio robot arm. float voltage = sensorValue * (5.0 / 1023.0); double gyroYrate = -((double)gy / 100.0); double gyroZrate = -((double)gz / 100.0); // Braccio.ServoMovement(0, gyroZangle, gyroYangle/2, gyroYangle, gyroYangle/2, gyroXangle, 10); //Braccio.ServoMovement(15, gyroZangle, gyroYangle/2, gyroYangle, gyroYangle/2, gyroXangle, 73); //Braccio.ServoMovement(15, gyroZangle, gyroYangle/2, gyroYangle, gyroYangle/2, gyroXangle, 10); Robotics is something that completely new to me. arduino-library-braccio-robot has no vulnerabilities reported, and its dependent libraries have no vulnerabilities reported. The crystals thus produce a current in consensus with the piezoelectric effect, and this current is amplified. The shield uses all the PWM digital pins on the Arduino UNO. I found this pretty hard, and had to dust off mathematics I hadn't thought about since the 1980's. The program can be downloaded from here. version 2.1 of the License, or (at your option) any later version. The range will vary from 0 to 180 and the last part is making the servo move accordingly. Elecrow CrowPi L is an 11.6-inch laptop shell based on Raspberry Pi 4 designed for STEM education with. The original Tinkerkit Braccio robot is sold out in the US but discounted on the European store for 159,20. Cholera Vaccine: Dubai? The shield provided with the robot arm is designed for Arduino UNO. . arduino braccio robot library The plastic strip is just to bring the sensor back to upright position when bent. This appears to be to do with "soft-starting" the servos but, as far as I can see, it just sits there pulsing pin 12 HIGH/LOW for 2 to 6 sends, then sets it HIGH. https://www.arduino.cc/en/Guide/Braccio. Site design / logo 2022 Stack Exchange Inc; user contributions licensed under CC BY-SA. Axis 4 This axis is known as wrist roll, and it rotates the upper arm of a robot in a circular movement. This library is distributed in the hope that it will be useful, Code complexity directly impacts maintainability of the code. The Arduino braccio is a 6 axis robot arm. This is called proportional control. Please read and accept our website Terms and Privacy Policy to post a comment.
{kind=link}
{kind=link}
.png){kind=link}
As the motor rotates, the potentiometer's resistance changes, so the control circuit can precisely regulate how much movement there is and in which direction. Thanks to my instructor Rudrapal who was kind enough to lend me his Arduino Braccio robotic arm, to experiment this week. -Understood the working of stepper motors, -Understood the working of a 6 Axis robot arm, -Learned how to calibrate and control the arm, -Controlled the working of the arm with different methods, -Programmed the arm to respond to wireless and wired commands. robot arm 5dof educational rc kit diy There certain libraries for Arduino and Processing that needs to be downloaded before we begin. First, we have to use Arduino to program the MPU6050 and then processing to look at the GUI. Braccio library has to be installed on Arduino to run the machine with the shield. An accelerometer works on the principle of the piezoelectric effect. arduino-library-braccio-robot has a low active ecosystem. Currently covering the most popular Java, JavaScript and Python libraries. Lesser General Public License for more details. For more information about this library please visit us at The Arduino library for the robot is available on Github, and hardware documentation for the carrier board can be found on Arduino website. Braccio.ServoMovement(20, 90, 90, 90, 90, 90, 73); Once the calibration was done I ran a few examples codes to see the working of the machine. Imagine that there is a fork-like structure that is in a constant back-and-forth motion. Had several trial and error methods to do it, but finally was able to do it. The links of the manipulator can be considered to form a kinematic chain. It is mandatory to procure user consent prior to running these cookies on your website. : The main objective of this week is to control the arm in multiple ways. It wouldn't have been possible without the help of a friend in the lab Kishan Chavda. The following is the calibration code and as shown the value 20 refers to the speed of the arm movement and then the following values are the angles of the servo. To watch the graphical interface of the movement we have to use Processing. It can be found in: --> Examples. Axis 2 It helps the lower arm of a robot to move in an up and down motion. However, I found calculating Denavit-Hartenberg (DH) parameters very difficult. Reviews, tutorials and the latest news about embedded systems, IoT, open-source hardware, SBC's, microcontrollers, processors, and more.
{kind=link}
https://docs-emea.rs-online.com/webdocs/14da/0900766b814da22f.pdf. I did have. One of the things I wanted to learn about was describing the kinematics of the robot. Portenta X8 is the first Arm Linux Arduino board, Review of SunFounder TS7-Pro 7-inch touchscreen display for Raspberry Pi 4, Rock 5B RK3588 SBC preview What works, what doesnt in Debian 11, CrowPi L Raspberry Pi 4 laptop review Part 1: Unboxing and teardown, This website uses cookies to improve your experience. The video for the same can be found below. After an initial period of familiarisation, I found the. braccio Asking for help, clarification, or responding to other answers.
{kind=link}
{kind=link}