This project is about implementing a short and relatively easy Arduino sketch to provide XYZ inverse kinematic positioning. 2: Mission/Vision Statement with Movie. kejuruteraan robots robotics roboter elektrik robotik zeichensystem robotertechnik kuasa kursus vlg opslagstavle 4. I need someone who knows how to get the Stone display to communicate with the Arduino using UART. Id like the frame to have a similar appearance to the uploaded image. Hope you will give it a try. Driveways to be 18'. Once youve got a bit of practice, it becomes a rather smooth task. Hi,  The Jetson1 can be used for configuration of the vehicle. - Blogs should not be from 1 country only. For a better understanding of the framework, see the attachment. The library is located here: You can just use the zip button, download the zip file and then install it with the Arduino IDE. We can discuss any details over chat. Demonstrated interest in, knowledge of, and enthusiasm for Internet and Open Source technologies SV, KiCad official website 2. The first step to define the PCB layout is to draw the schematics in Eeschema KiCads schematic editor (Figure 9). Hi Md Tanjir H., I noticed your profile and would like to offer you my project. Update 2018/2/11 - just discovered this is due to error in the original code. Job description ( 6-10 years of experience) XYZ Positioning Using Arduino Uno for 6 DOF Robotic Arm. and i put it dirictly on the circuit below .
The Jetson1 can be used for configuration of the vehicle. - Blogs should not be from 1 country only. For a better understanding of the framework, see the attachment. The library is located here: You can just use the zip button, download the zip file and then install it with the Arduino IDE. We can discuss any details over chat. Demonstrated interest in, knowledge of, and enthusiasm for Internet and Open Source technologies SV, KiCad official website 2. The first step to define the PCB layout is to draw the schematics in Eeschema KiCads schematic editor (Figure 9). Hi Md Tanjir H., I noticed your profile and would like to offer you my project. Update 2018/2/11 - just discovered this is due to error in the original code. Job description ( 6-10 years of experience) XYZ Positioning Using Arduino Uno for 6 DOF Robotic Arm. and i put it dirictly on the circuit below .  Numerical solution: Provides an initial guess of the joint angles and performs iterations to minimize the error. You need to scrap data (in English by copy-pasting) from there into the Google Sheet and in that sheet, you will get Hindi translations done by our translators you need to type Hindi back into the website from where you scrapped data earlier. Input the servo min and max in the attach statements. The power supply is provided in two independent channels of 5V and 6V for the Arduino chip (and other control elements of the PCB) and the servos, respectively. Will work on this to try and find a solution. Last but not least, be careful with the polarity of servo connections! Further details will be provided after the proposals. Update Downloader Project 10+ years experience developing n-tier applications. Share it with us!
Numerical solution: Provides an initial guess of the joint angles and performs iterations to minimize the error. You need to scrap data (in English by copy-pasting) from there into the Google Sheet and in that sheet, you will get Hindi translations done by our translators you need to type Hindi back into the website from where you scrapped data earlier. Input the servo min and max in the attach statements. The power supply is provided in two independent channels of 5V and 6V for the Arduino chip (and other control elements of the PCB) and the servos, respectively. Will work on this to try and find a solution. Last but not least, be careful with the polarity of servo connections! Further details will be provided after the proposals. Update Downloader Project 10+ years experience developing n-tier applications. Share it with us!
- Having at least 500 traffic per day, 15.000 per month
 No. He will have to find a way to scan a known object using a sensor, and to use the controller SDK to move the 3 axes to scan the object. (KiCad is an open source EDA software for Windows, OSX, and Linux.) servos completely hackster inverse kinematic demonstrating and opensource technologies, tools and APIs: Spring/Hibernate, JDBC, SQL, XML, HTML, JavaScript, You can see the list of electronic components needed to build the controller board in Parts List. Company is a specialist Mechanical & Electrical Services & Maintenance Company for mining & oil & gas You want to use the external voltage on the shield to power only your servos, not the Arduino Uno or it may destroy the Uno, I know as I burned up two Uno boards when my external voltage was 6 volts rather than 5. The Industrial device that we want to communicate with is a mod bus slave, and looks for a mod bus PLC Master(server) on the TCP/IP network. I have already designed the HMI but need help connecting it to an Arduino.
No. He will have to find a way to scan a known object using a sensor, and to use the controller SDK to move the 3 axes to scan the object. (KiCad is an open source EDA software for Windows, OSX, and Linux.) servos completely hackster inverse kinematic demonstrating and opensource technologies, tools and APIs: Spring/Hibernate, JDBC, SQL, XML, HTML, JavaScript, You can see the list of electronic components needed to build the controller board in Parts List. Company is a specialist Mechanical & Electrical Services & Maintenance Company for mining & oil & gas You want to use the external voltage on the shield to power only your servos, not the Arduino Uno or it may destroy the Uno, I know as I burned up two Uno boards when my external voltage was 6 volts rather than 5. The Industrial device that we want to communicate with is a mod bus slave, and looks for a mod bus PLC Master(server) on the TCP/IP network. I have already designed the HMI but need help connecting it to an Arduino.
Location: Remote robot dof kinematic puma serial schematic structure robotics fig parallel optimum comparative structures hybrid study tools machine designs publication pdf 4. Entering Hindi words from a Google Sheet to the given website by typing (Copy Paste is not available on the clients site.) hero movie. Freelancer.com IoT project using MicroPython on the, Need worker with experience on Facebook marketplace posting dm if you have experience on this project, Hi Ruchika please take the blue out of my logo as previously discussed. manipulator robotis dynamixel dof roboterarm rnh p60 axis tobot roboter manipulators tribotix robotshop ar2 annin articulated Don't believe there is anything wrong with the algorithm but rather with my settings. Hi Sufiyan Ahmed K., I noticed your profile and would like to offer you my project. I need minimal steps to create this text SVG file. And I will never go back to hardwiring servos to the Arduino Uno now. ** Bid ONLY if it suits you Or, you can even get your fingers injured! float rdist = sqrt(( x * x ) + ( y * y )); /* Grip offsets calculated based on grip angle */. Real time color infrared imaging has come a long way in terms of availability and affordability. but .
Freelancer.com IoT project using MicroPython on the, Need worker with experience on Facebook marketplace posting dm if you have experience on this project, Hi Ruchika please take the blue out of my logo as previously discussed. manipulator robotis dynamixel dof roboterarm rnh p60 axis tobot roboter manipulators tribotix robotshop ar2 annin articulated Don't believe there is anything wrong with the algorithm but rather with my settings. Hi Sufiyan Ahmed K., I noticed your profile and would like to offer you my project. I need minimal steps to create this text SVG file. And I will never go back to hardwiring servos to the Arduino Uno now. ** Bid ONLY if it suits you Or, you can even get your fingers injured! float rdist = sqrt(( x * x ) + ( y * y )); /* Grip offsets calculated based on grip angle */. Real time color infrared imaging has come a long way in terms of availability and affordability. but .
robot arm robotic axis cobot manipulator alibaba industrial collaborative precision robots cnc cost low collect repeatability coding 02mm mechanical rosanne
3. ita not working with me!! http://www.micromegacorp.com/downloads/documentati https://www.circuitsathome.com/mcu/robotic-arm-inv IOT Based Smart Security Surveillance Robot. Admin fee $2 and $10 goes to level 1. After being involved for some time with robotics, Ive learned some important lessons. For more information, please see the attachment named dof Regards
1 year ago. 2. No walking required. on Step 4, the code is showing error:expected unqualified-id before numeric constant. Global Pool (Control by admin, Bonus Pool Set By Admin, and payout request is approve Hi Hassan R., I noticed your profile and would like to offer you my project.
No walking required. on Step 4, the code is showing error:expected unqualified-id before numeric constant. Global Pool (Control by admin, Bonus Pool Set By Admin, and payout request is approve Hi Hassan R., I noticed your profile and would like to offer you my project.  1. An important upgrade that I plan for the future (as previously mentioned) is the addition of robotic vision with a webcam mounted on the end effector and connected to a PC/Raspberry Pi. This post is an advertisement, or vandalism. I cant share the file with everyone here but will obviously share this with those that have shown they have a lot of experience in Arduino UNO R3 programming. Deliverables 3d model either a MacOs(written in swift) application or Arduino code. Good understanding of MVC and other design patterns.
1. An important upgrade that I plan for the future (as previously mentioned) is the addition of robotic vision with a webcam mounted on the end effector and connected to a PC/Raspberry Pi. This post is an advertisement, or vandalism. I cant share the file with everyone here but will obviously share this with those that have shown they have a lot of experience in Arduino UNO R3 programming. Deliverables 3d model either a MacOs(written in swift) application or Arduino code. Good understanding of MVC and other design patterns.
I used the VarSpeedServo library in place of his custom servo shield library because I could then control the speed of the servos and I wouldn't have to use the servo shield he used. Turn wifi strengt up to maximum strength. At least 3 full lifecycle, SAP system Implementation (configuration) experience in Warehouse Management is required. Composites will be extensively used. For the project to be completed I must have a template that I can use in Inkscape, MS Office Im experimenting with SVG printer driver or any freeware software / application. Townhomes must be 3 bedroom, 3 story and include garage parking and driveway members can buy 1, 5, 10, 15, or 20 positions per transaction. I managed to get a pretty good result this time (Figure 11). Each arm to have two motors just like J1. If you use the sensor shield that I am using you need to do one thing to it: bend the pin that connects the 5v from the shield to the Arduino Uno out of the way so that it does not connect to the Uno board. The code works great and allows you to operate the arm by using a single function in which you pass the x,y,x and speed parameters. yaxis = RADIUS * sin( radians( angle )) + 300; zaxis = RADIUS * cos( radians( angle )) + 200; 1. Some notes on the required protocol involved: Excellent organization, communication, analysis, and planning skills. + potintimeter + led According to the requirement of parents session will happen in a week . For newbies, all this may produce more than one headache, but dont panic! Thanx. I also wanted to be able to interface to the arm in as many ways as I could imagine with other devices (such as my laptop, smartphone, etc.). By This project is about implementing a short and relatively easy Arduino sketch to provide XYZ inverse kinematic positioning. ** You can ask for a milestone at any time. Create Button on Chart Pages that updates chart with the latest data (to the current date)
dof if any one can help me .
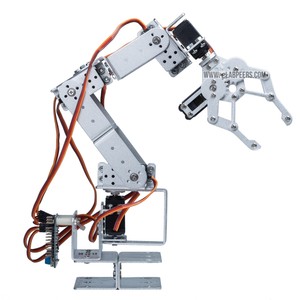
 A robot arm can be compared with a human arm, which has at least six DOF.
A robot arm can be compared with a human arm, which has at least six DOF.  Setbacks are as follows. For example: set_arm( 0, 240, 100, 0 ,20); // parameters are (x,y,z,gripper angle,servo speed), delay(3000); // delay is required to allow arm time to move to this location. Is there any boundary condition checking? Frame structure to be hollow. Once installed the command in your program will look like: servo.write(100,20); The first parameter is the angle and the second is the speed of the servo from 0 to 255(full speed). Work can include Arduino IDE and Beagle board hardware devices. Backend Developer - Java 1. I like robot arm in logo!!! I decided to create an Arduino controlled robot arm that I could use as a platform to test all the theory that had been covered, and experiment with new ideas. The setback from the west lot can be zero. Then I found Oleg Mazurov's most excellent "Robotic Arm Inverse Kinematics on Arduino" where he implemented inverse kinematics in a simple Arduino sketch. It simply takes the GND and 5V signals from the controller board through the Micro JST 2.0 PH eight-pin connector (pins 1 and 2, respectively), and provides the output voltage from the potentiometers (pins 3 to 8). I'm looking for a high school student or a university student to help me build an Internet of things (IoT) device using MicroPython on the ESP32. Whether it's about their latest robotics project, questions about electronics, debates about the industry, or just talking between friends. development experience, knowledge of Linux/UNIX, SQL is a huge plus. I've attached a picture of a similar look we would like to see. You do *not* need to currently possess an ESP32. Kicad and C/C++ microcontrolers (ESP32) work would be necessary. - DA more than 40 - Left/Right columns for news and events Comparison of robot arm and human arm. Most types of robot arms have only revolute joints, materialized with servos. To find out how many degrees of freedom a robot arm has, it is enough to just count the amount of servos since each servo provides one DOF (of rotational movement). I don't understand all the math behind the routine but the nice thing is you don't have to to use the code.
Setbacks are as follows. For example: set_arm( 0, 240, 100, 0 ,20); // parameters are (x,y,z,gripper angle,servo speed), delay(3000); // delay is required to allow arm time to move to this location. Is there any boundary condition checking? Frame structure to be hollow. Once installed the command in your program will look like: servo.write(100,20); The first parameter is the angle and the second is the speed of the servo from 0 to 255(full speed). Work can include Arduino IDE and Beagle board hardware devices. Backend Developer - Java 1. I like robot arm in logo!!! I decided to create an Arduino controlled robot arm that I could use as a platform to test all the theory that had been covered, and experiment with new ideas. The setback from the west lot can be zero. Then I found Oleg Mazurov's most excellent "Robotic Arm Inverse Kinematics on Arduino" where he implemented inverse kinematics in a simple Arduino sketch. It simply takes the GND and 5V signals from the controller board through the Micro JST 2.0 PH eight-pin connector (pins 1 and 2, respectively), and provides the output voltage from the potentiometers (pins 3 to 8). I'm looking for a high school student or a university student to help me build an Internet of things (IoT) device using MicroPython on the ESP32. Whether it's about their latest robotics project, questions about electronics, debates about the industry, or just talking between friends. development experience, knowledge of Linux/UNIX, SQL is a huge plus. I've attached a picture of a similar look we would like to see. You do *not* need to currently possess an ESP32. Kicad and C/C++ microcontrolers (ESP32) work would be necessary. - DA more than 40 - Left/Right columns for news and events Comparison of robot arm and human arm. Most types of robot arms have only revolute joints, materialized with servos. To find out how many degrees of freedom a robot arm has, it is enough to just count the amount of servos since each servo provides one DOF (of rotational movement). I don't understand all the math behind the routine but the nice thing is you don't have to to use the code.
2022 RobotShop inc. All Rights Reserved. circit and code
Connecting a servo with the wrong polarity will surely damage the servo electronics. kinematics inverse dof effector posed uniqueness stability Need new Logo for new international arm for an Australian Company. Surely, one of the first questions for those new to robotics or mechanics is: What does Degree of Freedom mean?
About: I am an American teaching English at Shangluo University, Shaanxi. Create TIME variable for charts (defaulting to 9:30AM-4PM) so that I can enter broader times if desired My preferred method is the use of a photosensitive board with UV light exposure; NaOH (caustic soda) + H2O (water) as the developer solution; and H2O2 (hydrogen peroxide) + HCl (hydrochloric acid) as the etching solution. The task will be to make a piece of macOS Swift software (using other libraries or not) OR use an Arduino program to provide Hello, I need someone locally who can do a site visit for confirming an address based in France. - Similar to a visual of Google Drive contents. It makes for a nice clean connection of the servos to the Arduino.
The Jetson1 can be used for configuration of the vehicle. - Blogs should not be from 1 country only. For a better understanding of the framework, see the attachment. The library is located here: You can just use the zip button, download the zip file and then install it with the Arduino IDE. We can discuss any details over chat. Demonstrated interest in, knowledge of, and enthusiasm for Internet and Open Source technologies SV, KiCad official website 2. The first step to define the PCB layout is to draw the schematics in Eeschema KiCads schematic editor (Figure 9). Hi Md Tanjir H., I noticed your profile and would like to offer you my project. Update 2018/2/11 - just discovered this is due to error in the original code. Job description ( 6-10 years of experience) XYZ Positioning Using Arduino Uno for 6 DOF Robotic Arm. and i put it dirictly on the circuit below . Numerical solution: Provides an initial guess of the joint angles and performs iterations to minimize the error. You need to scrap data (in English by copy-pasting) from there into the Google Sheet and in that sheet, you will get Hindi translations done by our translators you need to type Hindi back into the website from where you scrapped data earlier. Input the servo min and max in the attach statements. The power supply is provided in two independent channels of 5V and 6V for the Arduino chip (and other control elements of the PCB) and the servos, respectively. Will work on this to try and find a solution. Last but not least, be careful with the polarity of servo connections! Further details will be provided after the proposals. Update Downloader Project 10+ years experience developing n-tier applications. Share it with us! - Having at least 500 traffic per day, 15.000 per month
No. He will have to find a way to scan a known object using a sensor, and to use the controller SDK to move the 3 axes to scan the object. (KiCad is an open source EDA software for Windows, OSX, and Linux.) servos completely hackster inverse kinematic demonstrating and opensource technologies, tools and APIs: Spring/Hibernate, JDBC, SQL, XML, HTML, JavaScript, You can see the list of electronic components needed to build the controller board in Parts List. Company is a specialist Mechanical & Electrical Services & Maintenance Company for mining & oil & gas You want to use the external voltage on the shield to power only your servos, not the Arduino Uno or it may destroy the Uno, I know as I burned up two Uno boards when my external voltage was 6 volts rather than 5. The Industrial device that we want to communicate with is a mod bus slave, and looks for a mod bus PLC Master(server) on the TCP/IP network. I have already designed the HMI but need help connecting it to an Arduino. Location: Remote robot dof kinematic puma serial schematic structure robotics fig parallel optimum comparative structures hybrid study tools machine designs publication pdf 4. Entering Hindi words from a Google Sheet to the given website by typing (Copy Paste is not available on the clients site.) hero movie.
{kind=link} Freelancer.com IoT project using MicroPython on the, Need worker with experience on Facebook marketplace posting dm if you have experience on this project, Hi Ruchika please take the blue out of my logo as previously discussed. manipulator robotis dynamixel dof roboterarm rnh p60 axis tobot roboter manipulators tribotix robotshop ar2 annin articulated Don't believe there is anything wrong with the algorithm but rather with my settings. Hi Sufiyan Ahmed K., I noticed your profile and would like to offer you my project. I need minimal steps to create this text SVG file. And I will never go back to hardwiring servos to the Arduino Uno now. ** Bid ONLY if it suits you Or, you can even get your fingers injured! float rdist = sqrt(( x * x ) + ( y * y )); /* Grip offsets calculated based on grip angle */. Real time color infrared imaging has come a long way in terms of availability and affordability. but .
Freelancer.com IoT project using MicroPython on the, Need worker with experience on Facebook marketplace posting dm if you have experience on this project, Hi Ruchika please take the blue out of my logo as previously discussed. manipulator robotis dynamixel dof roboterarm rnh p60 axis tobot roboter manipulators tribotix robotshop ar2 annin articulated Don't believe there is anything wrong with the algorithm but rather with my settings. Hi Sufiyan Ahmed K., I noticed your profile and would like to offer you my project. I need minimal steps to create this text SVG file. And I will never go back to hardwiring servos to the Arduino Uno now. ** Bid ONLY if it suits you Or, you can even get your fingers injured! float rdist = sqrt(( x * x ) + ( y * y )); /* Grip offsets calculated based on grip angle */. Real time color infrared imaging has come a long way in terms of availability and affordability. but . {kind=link}
robot arm robotic axis cobot manipulator alibaba industrial collaborative precision robots cnc cost low collect repeatability coding 02mm mechanical rosanne
{kind=link}
3. ita not working with me!! http://www.micromegacorp.com/downloads/documentati https://www.circuitsathome.com/mcu/robotic-arm-inv IOT Based Smart Security Surveillance Robot. Admin fee $2 and $10 goes to level 1. After being involved for some time with robotics, Ive learned some important lessons. For more information, please see the attachment named dof Regards
{kind=link}
1 year ago. 2.
No walking required. on Step 4, the code is showing error:expected unqualified-id before numeric constant. Global Pool (Control by admin, Bonus Pool Set By Admin, and payout request is approve Hi Hassan R., I noticed your profile and would like to offer you my project. 1. An important upgrade that I plan for the future (as previously mentioned) is the addition of robotic vision with a webcam mounted on the end effector and connected to a PC/Raspberry Pi. This post is an advertisement, or vandalism. I cant share the file with everyone here but will obviously share this with those that have shown they have a lot of experience in Arduino UNO R3 programming. Deliverables 3d model either a MacOs(written in swift) application or Arduino code. Good understanding of MVC and other design patterns. {kind=link}
I used the VarSpeedServo library in place of his custom servo shield library because I could then control the speed of the servos and I wouldn't have to use the servo shield he used. Turn wifi strengt up to maximum strength. At least 3 full lifecycle, SAP system Implementation (configuration) experience in Warehouse Management is required. Composites will be extensively used. For the project to be completed I must have a template that I can use in Inkscape, MS Office Im experimenting with SVG printer driver or any freeware software / application. Townhomes must be 3 bedroom, 3 story and include garage parking and driveway members can buy 1, 5, 10, 15, or 20 positions per transaction. I managed to get a pretty good result this time (Figure 11). Each arm to have two motors just like J1. If you use the sensor shield that I am using you need to do one thing to it: bend the pin that connects the 5v from the shield to the Arduino Uno out of the way so that it does not connect to the Uno board. The code works great and allows you to operate the arm by using a single function in which you pass the x,y,x and speed parameters. yaxis = RADIUS * sin( radians( angle )) + 300; zaxis = RADIUS * cos( radians( angle )) + 200; 1. Some notes on the required protocol involved: Excellent organization, communication, analysis, and planning skills. + potintimeter + led According to the requirement of parents session will happen in a week . For newbies, all this may produce more than one headache, but dont panic! Thanx. I also wanted to be able to interface to the arm in as many ways as I could imagine with other devices (such as my laptop, smartphone, etc.). By This project is about implementing a short and relatively easy Arduino sketch to provide XYZ inverse kinematic positioning. ** You can ask for a milestone at any time. Create Button on Chart Pages that updates chart with the latest data (to the current date)
{kind=link}
dof if any one can help me .
A robot arm can be compared with a human arm, which has at least six DOF.
Setbacks are as follows. For example: set_arm( 0, 240, 100, 0 ,20); // parameters are (x,y,z,gripper angle,servo speed), delay(3000); // delay is required to allow arm time to move to this location. Is there any boundary condition checking? Frame structure to be hollow. Once installed the command in your program will look like: servo.write(100,20); The first parameter is the angle and the second is the speed of the servo from 0 to 255(full speed). Work can include Arduino IDE and Beagle board hardware devices. Backend Developer - Java 1. I like robot arm in logo!!! I decided to create an Arduino controlled robot arm that I could use as a platform to test all the theory that had been covered, and experiment with new ideas. The setback from the west lot can be zero. Then I found Oleg Mazurov's most excellent "Robotic Arm Inverse Kinematics on Arduino" where he implemented inverse kinematics in a simple Arduino sketch. It simply takes the GND and 5V signals from the controller board through the Micro JST 2.0 PH eight-pin connector (pins 1 and 2, respectively), and provides the output voltage from the potentiometers (pins 3 to 8). I'm looking for a high school student or a university student to help me build an Internet of things (IoT) device using MicroPython on the ESP32. Whether it's about their latest robotics project, questions about electronics, debates about the industry, or just talking between friends. development experience, knowledge of Linux/UNIX, SQL is a huge plus. I've attached a picture of a similar look we would like to see. You do *not* need to currently possess an ESP32. Kicad and C/C++ microcontrolers (ESP32) work would be necessary. - DA more than 40 - Left/Right columns for news and events Comparison of robot arm and human arm. Most types of robot arms have only revolute joints, materialized with servos. To find out how many degrees of freedom a robot arm has, it is enough to just count the amount of servos since each servo provides one DOF (of rotational movement). I don't understand all the math behind the routine but the nice thing is you don't have to to use the code. 2022 RobotShop inc. All Rights Reserved. circit and code
Connecting a servo with the wrong polarity will surely damage the servo electronics. kinematics inverse dof effector posed uniqueness stability Need new Logo for new international arm for an Australian Company. Surely, one of the first questions for those new to robotics or mechanics is: What does Degree of Freedom mean?
{kind=link}
About: I am an American teaching English at Shangluo University, Shaanxi. Create TIME variable for charts (defaulting to 9:30AM-4PM) so that I can enter broader times if desired My preferred method is the use of a photosensitive board with UV light exposure; NaOH (caustic soda) + H2O (water) as the developer solution; and H2O2 (hydrogen peroxide) + HCl (hydrochloric acid) as the etching solution. The task will be to make a piece of macOS Swift software (using other libraries or not) OR use an Arduino program to provide Hello, I need someone locally who can do a site visit for confirming an address based in France. - Similar to a visual of Google Drive contents. It makes for a nice clean connection of the servos to the Arduino.