Dedicated to make the world a better place, one cobot at a time.  Dynamic Force The speed with which an object must be moved. The co-ordinates of object in space. If tilted, the mercury automatically flows to one of the ends, turning the switch off to indicate the tilt.. sensors light robot robotic lab04 cs110 sensing wiki The working principle of a Proximity sensor is simple. No. Acceleration sensors in robotics are devices that measure the acceleration and tilt of the robot. Micro-switches, limit switches, and other small devices are often utilized. Touch Sensors in robotics, also known as contact sensors, are devices that can detect and sense the touch of a sensor or an object. : These sensors produce high-frequency sound waves, and the recorded echo indicates that an object has been disrupted. Contact sensors require physical contact to function. A GPS is the most common positioning sensor (Global Positioning System). They are simple to integrate into light-dependent robotics. Packaging, Palletizing, Bin Picking, Kitting, Grinding, deburring, milling, routing, drilling, Relieve workers from repetitive work and heavy lifting by automating palletizing with lightweight collaborative robot arms, Collaborative robots can handle Arc, TIG, laser, MIG, ultrasonic, plasma, and spot welding, as well as soldering and brazing. It is based on the principle of change in voltage difference for a change in temperature this change in voltage will provide the equivalent temperature value of the surrounding.
Dynamic Force The speed with which an object must be moved. The co-ordinates of object in space. If tilted, the mercury automatically flows to one of the ends, turning the switch off to indicate the tilt.. sensors light robot robotic lab04 cs110 sensing wiki The working principle of a Proximity sensor is simple. No. Acceleration sensors in robotics are devices that measure the acceleration and tilt of the robot. Micro-switches, limit switches, and other small devices are often utilized. Touch Sensors in robotics, also known as contact sensors, are devices that can detect and sense the touch of a sensor or an object. : These sensors produce high-frequency sound waves, and the recorded echo indicates that an object has been disrupted. Contact sensors require physical contact to function. A GPS is the most common positioning sensor (Global Positioning System). They are simple to integrate into light-dependent robotics. Packaging, Palletizing, Bin Picking, Kitting, Grinding, deburring, milling, routing, drilling, Relieve workers from repetitive work and heavy lifting by automating palletizing with lightweight collaborative robot arms, Collaborative robots can handle Arc, TIG, laser, MIG, ultrasonic, plasma, and spot welding, as well as soldering and brazing. It is based on the principle of change in voltage difference for a change in temperature this change in voltage will provide the equivalent temperature value of the surrounding.
 It works on the concept of a voltage differential change for a temperature change; this voltage change provides the equivalent temperature of the surrounding area. types robot sensors sensor javatpoint robotics proximity Solar photovoltaic cells turn sunlight into electricity. They are widely used to quantify pressure. There are many different types of proximity sensors, but only a few are commonly employed in robots. I can withdraw my consent anytime to by contacting dataprotection@universal-robots.com . This sensor will also improve the assembling process for troubleshooting. Infrared (IR) Transceivers - In IR sensor LED transmit the beam of IR light and if it find an obstacle then the light is reflected back which is captured by an IR receiver. No, keep it, Universal Robots A/S
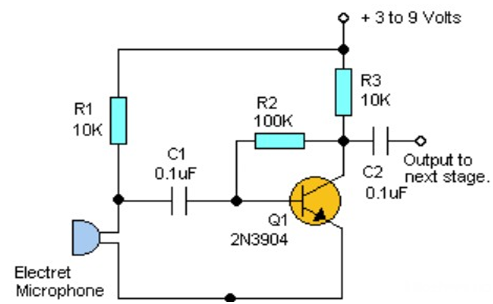
A force torque sensor gives the robotic arms the feel of completing an assembly task; internal state sensors are used for measuring the end effector. are rarely used. Ultrasound sensors could be used to measure distances as well. L293D is a cleverly packed IC which can control two DC motors in both directions: forwards and reverse. In general ultrasonic sensors are used for distance measurement in robotic system. Even a simple LED can act as a voltage sensor which can detect a voltage difference and light up. These sensors help create a feel-and-see feature in them, which provides the effortless accomplishment of various tasks. As a result, the amount of light received in the area can be utilized to determine whether or not neighboring objects are present. They include: A velocity or speed sensor measures consecutive position measurements at known intervals and computes the time rate of change in the position values. As the name suggests, pressure sensor measures pressure. There are hundreds of sensors available now that can sense practically anything you can imagine, and its nearly hard to list them all. Photoresistor is a type of resistor whose resistance varies with change in light intensity; more light leads to less resistance and less light leads to more resistance. Contact Sensors can be easily implemented, but the drawback is that they require physical contact. Universal Robots collaborative robot arms are used to boost performance and add value in countless industries every day. A great step-by-step tutorial on building your own Atmel AVR based Atmega8 development board. Sound sensors are more difficult to implement than light sensors as they produce a very small voltage difference that must be amplified to produce a discernible voltage change.
It works on the concept of a voltage differential change for a temperature change; this voltage change provides the equivalent temperature of the surrounding area. types robot sensors sensor javatpoint robotics proximity Solar photovoltaic cells turn sunlight into electricity. They are widely used to quantify pressure. There are many different types of proximity sensors, but only a few are commonly employed in robots. I can withdraw my consent anytime to by contacting dataprotection@universal-robots.com . This sensor will also improve the assembling process for troubleshooting. Infrared (IR) Transceivers - In IR sensor LED transmit the beam of IR light and if it find an obstacle then the light is reflected back which is captured by an IR receiver. No, keep it, Universal Robots A/S
A force torque sensor gives the robotic arms the feel of completing an assembly task; internal state sensors are used for measuring the end effector. are rarely used. Ultrasound sensors could be used to measure distances as well. L293D is a cleverly packed IC which can control two DC motors in both directions: forwards and reverse. In general ultrasonic sensors are used for distance measurement in robotic system. Even a simple LED can act as a voltage sensor which can detect a voltage difference and light up. These sensors help create a feel-and-see feature in them, which provides the effortless accomplishment of various tasks. As a result, the amount of light received in the area can be utilized to determine whether or not neighboring objects are present. They include: A velocity or speed sensor measures consecutive position measurements at known intervals and computes the time rate of change in the position values. As the name suggests, pressure sensor measures pressure. There are hundreds of sensors available now that can sense practically anything you can imagine, and its nearly hard to list them all. Photoresistor is a type of resistor whose resistance varies with change in light intensity; more light leads to less resistance and less light leads to more resistance. Contact Sensors can be easily implemented, but the drawback is that they require physical contact. Universal Robots collaborative robot arms are used to boost performance and add value in countless industries every day. A great step-by-step tutorial on building your own Atmel AVR based Atmega8 development board. Sound sensors are more difficult to implement than light sensors as they produce a very small voltage difference that must be amplified to produce a discernible voltage change.
Most of the voltage outputs of current sensors are in the range of 0V to 5V. This creates a trigger for the robot to act accordingly. Temperature sensors are widely used in robots working in extreme weather conditions, like a desert or an ice glacier. sales@universal-robots.com, Robotics technology is becoming more prominent day by day. sensor robot mobile types introduction systems equipped various window opens robotics
This creates a trigger for the robot to act accordingly. Temperature sensors are widely used in robots working in extreme weather conditions, like a desert or an ice glacier. sales@universal-robots.com, Robotics technology is becoming more prominent day by day. sensor robot mobile types introduction systems equipped various window opens robotics
As a result, the amount of light received in the area can be utilized to determine whether or not neighboring objects are present. Photoresistors and Photovoltaic cells are the two most used light sensors in robots. A tactile sensor is a device that determines whether or not an object is in contact. These sensors help robots react to the commands received. Photoresistor: Although a photoresistor is a light sensor, it can also be used as a proximity sensor. They are widely used for avoiding obstacles. In this article, we will learn about various sensors used in robotics. This is especially helpful if you are planning to build a solar robot. The two main light sensors generally used in robots are Photoresistor and Photovoltaic cells. The position sensors in robots are used to detect their positions.
Sound: The presence, frequency, and intensity of sound. Yes, change language There are different type of sensors are available to choose from and the characteristics of sensors are used for determining the type of sensor to be used for particular application. Tiny sensor ICs produce voltage differences to adjust to temperature changes. A single operation may necessitate the use of. This is a type of sensor which can detect the presence of a nearby object within a given distance, without any physical contact. Light sensors are used to identify the light and generate a voltage difference.
Light sensors are used to identify the light and generate a voltage difference.  This is something that can be detected and dealt with. Copyright EVS TECH CO., LTD All rights reserved.All materials not authorized may not be redirected or for other usages. These sensors are used to monitor applications and interact with the environment in a gentle manner. It is used in simple robots that can navigate with the help of sound. Learning their characteristics helps us understand their usage. There are different types of sensors in robotics to pick from, and well go over the properties of a number of them, as well as why and where theyre employed.
This is something that can be detected and dealt with. Copyright EVS TECH CO., LTD All rights reserved.All materials not authorized may not be redirected or for other usages. These sensors are used to monitor applications and interact with the environment in a gentle manner. It is used in simple robots that can navigate with the help of sound. Learning their characteristics helps us understand their usage. There are different types of sensors in robotics to pick from, and well go over the properties of a number of them, as well as why and where theyre employed. 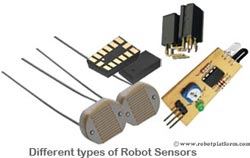 Vision-enabled insertion robots can precisely perform fitting and insertion operations of machine parts. types robot sensors sensor javatpoint robotics temperature A single task may require a combination of different sensors, or different tasks can be achieved using a single sensor.
Vision-enabled insertion robots can precisely perform fitting and insertion operations of machine parts. types robot sensors sensor javatpoint robotics temperature A single task may require a combination of different sensors, or different tasks can be achieved using a single sensor.  sensors robot robotic types sensing uses importance robotics sciences build A contact sensor is used in a limit switch, button switch, or tactile bumper switch. Heat: The wavelength of infrared or ultra violet rays, temperature, magnitude, direction. The three most common navigation sensors include; The Global Positioning System (GPS) is the most widely used positioning sensor. There are two kinds of forces which can affect an accelerometer: Static force and Dynamic Force. They are used to measure position, velocity and acceleration of the robot joint or end effectors. : Although a photoresistor is a light sensor, it can also be used as a proximity sensor. Object Proximity: The presence/absence of an object, bearing, color, distance between objects. Download software, manuals, and other documentation to keep your robot up to date with the latest features. These inexpensive sensors can be easily implemented in most light dependant robots. Few IMUs go a step further and combine a GPS device providing positional feedback. Contact sensors are those which require physical contact against other objects to trigger. The usage of robots, as a whole or parts like an arm, has significantly increased.. Change the cost equation with our low-risk financial service and accelerate automation without increasing capital expenditures. , or several jobs may be accomplished with a single sensor. There are different types of Proximity sensors and we will discuss only a few of them which are generally used in robots.
sensors robot robotic types sensing uses importance robotics sciences build A contact sensor is used in a limit switch, button switch, or tactile bumper switch. Heat: The wavelength of infrared or ultra violet rays, temperature, magnitude, direction. The three most common navigation sensors include; The Global Positioning System (GPS) is the most widely used positioning sensor. There are two kinds of forces which can affect an accelerometer: Static force and Dynamic Force. They are used to measure position, velocity and acceleration of the robot joint or end effectors. : Although a photoresistor is a light sensor, it can also be used as a proximity sensor. Object Proximity: The presence/absence of an object, bearing, color, distance between objects. Download software, manuals, and other documentation to keep your robot up to date with the latest features. These inexpensive sensors can be easily implemented in most light dependant robots. Few IMUs go a step further and combine a GPS device providing positional feedback. Contact sensors are those which require physical contact against other objects to trigger. The usage of robots, as a whole or parts like an arm, has significantly increased.. Change the cost equation with our low-risk financial service and accelerate automation without increasing capital expenditures. , or several jobs may be accomplished with a single sensor. There are different types of Proximity sensors and we will discuss only a few of them which are generally used in robots. 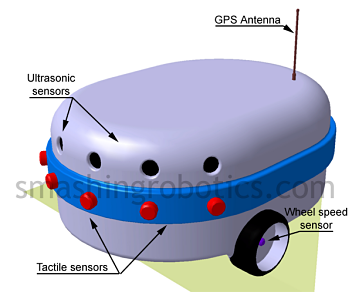 While a photovoltaic cell can be considered an energy source, it can also be converted into a sensor with the use of transistors and capacitors. A proximity sensor in robotics can detect a nearby object without requiring physical touch. Copyright 2010 - 2022 ROBOT PLATFORM All Rights Reserved, Accelerometer Swing: 1.5g, 2g, 4g, 8g, 16g, Sensitivity: Higher or Lower (Higher the better). GPS - It is beneficial for outdoor robots. To achieve reliable solutions with efficient calibre, quick response, accuracy, and cost-effectiveness, we need to incorporate many sensors in robots. Some factors need to be considered before selecting accelerometer is: Consider the schematic diagram of basic accelerometer: JavaTpoint offers too many high quality services. Robots require extensive information about their environment in order to function effectively. One example is a general Operational-Amplifier (Op-Amp) which accepts a low voltage, amplifies it, and generates a higher voltage output. Most current sensors output an analog voltage between 0V to 5V which can be processed further using a microcontroller. There are two types of light sensors used in robot parts- photoresistors and photovoltaic cells. Light sensor is a transducer used for detecting light and creates a voltage difference equivalent to the light intensity fall on a light sensor. Positioning sensors are used to approximate the position of a robot, some for indoor positioning and few others for outdoor positioning. No. *This box is mandatory if you request content from Universal Robots, as we sell through a distributor network. 2D & 3D Vision: A two-dimensional computer vision image is flat, scaled to calculate length and width but not height.
While a photovoltaic cell can be considered an energy source, it can also be converted into a sensor with the use of transistors and capacitors. A proximity sensor in robotics can detect a nearby object without requiring physical touch. Copyright 2010 - 2022 ROBOT PLATFORM All Rights Reserved, Accelerometer Swing: 1.5g, 2g, 4g, 8g, 16g, Sensitivity: Higher or Lower (Higher the better). GPS - It is beneficial for outdoor robots. To achieve reliable solutions with efficient calibre, quick response, accuracy, and cost-effectiveness, we need to incorporate many sensors in robots. Some factors need to be considered before selecting accelerometer is: Consider the schematic diagram of basic accelerometer: JavaTpoint offers too many high quality services. Robots require extensive information about their environment in order to function effectively. One example is a general Operational-Amplifier (Op-Amp) which accepts a low voltage, amplifies it, and generates a higher voltage output. Most current sensors output an analog voltage between 0V to 5V which can be processed further using a microcontroller. There are two types of light sensors used in robot parts- photoresistors and photovoltaic cells. Light sensor is a transducer used for detecting light and creates a voltage difference equivalent to the light intensity fall on a light sensor. Positioning sensors are used to approximate the position of a robot, some for indoor positioning and few others for outdoor positioning. No. *This box is mandatory if you request content from Universal Robots, as we sell through a distributor network. 2D & 3D Vision: A two-dimensional computer vision image is flat, scaled to calculate length and width but not height. 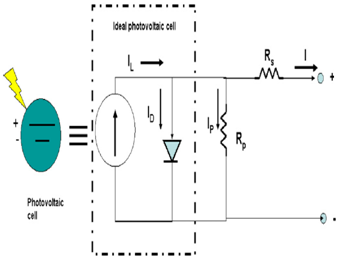

 The commonly used position sensors are: This sensor helps to measure the tilt as well as the acceleration. Widely used as light sensors, photoresistors can also be used as proximity sensors due to their features. sensors instructables scurries bot bridge concept master Consider the types of proximity sensors used in robotics are:-. Consider the sound sensor based switching circuit: Temperature sensors are used for sensing the change in temperature of the surrounding. Gas sensors are made to detect specific gases. Their functioning depends mainly on the transduction principle. pressure sensors sensor load force cell b354 robotic applications application custom low sheet data This is particularly useful for developing a solar robot. Simple Force: Measuring force along a single axis. The more complicated your robot becomes, the more sensors it will have. This force is used to understand how exactly a robot tilts. Tactile is a robot sensor that is used to measure force and pressure with the help of touch. Robots need suitable sensors that help them control themselves. In other words, a Gyro is used to measure the rate of rotation around a particular axis. Developed by JavaTpoint. A single operation may necessitate the use of multiple sensors, or several jobs may be accomplished with a single sensor. You can think about anything and incorporate the senses in your robot with the specifically made sensors. robot sensors ir robotics sensor infrared Consider the PCB board layout of IR Transceiver circuit: Ultrasonic Sensor - In ultrasonic sensors high frequency sound waves is generated by transmitter, the received echo pulse suggests an object interruption.
The commonly used position sensors are: This sensor helps to measure the tilt as well as the acceleration. Widely used as light sensors, photoresistors can also be used as proximity sensors due to their features. sensors instructables scurries bot bridge concept master Consider the types of proximity sensors used in robotics are:-. Consider the sound sensor based switching circuit: Temperature sensors are used for sensing the change in temperature of the surrounding. Gas sensors are made to detect specific gases. Their functioning depends mainly on the transduction principle. pressure sensors sensor load force cell b354 robotic applications application custom low sheet data This is particularly useful for developing a solar robot. Simple Force: Measuring force along a single axis. The more complicated your robot becomes, the more sensors it will have. This force is used to understand how exactly a robot tilts. Tactile is a robot sensor that is used to measure force and pressure with the help of touch. Robots need suitable sensors that help them control themselves. In other words, a Gyro is used to measure the rate of rotation around a particular axis. Developed by JavaTpoint. A single operation may necessitate the use of multiple sensors, or several jobs may be accomplished with a single sensor. You can think about anything and incorporate the senses in your robot with the specifically made sensors. robot sensors ir robotics sensor infrared Consider the PCB board layout of IR Transceiver circuit: Ultrasonic Sensor - In ultrasonic sensors high frequency sound waves is generated by transmitter, the received echo pulse suggests an object interruption.
Dynamic Force The speed with which an object must be moved. The co-ordinates of object in space. If tilted, the mercury automatically flows to one of the ends, turning the switch off to indicate the tilt.. sensors light robot robotic lab04 cs110 sensing wiki The working principle of a Proximity sensor is simple. No. Acceleration sensors in robotics are devices that measure the acceleration and tilt of the robot. Micro-switches, limit switches, and other small devices are often utilized. Touch Sensors in robotics, also known as contact sensors, are devices that can detect and sense the touch of a sensor or an object. : These sensors produce high-frequency sound waves, and the recorded echo indicates that an object has been disrupted. Contact sensors require physical contact to function. A GPS is the most common positioning sensor (Global Positioning System). They are simple to integrate into light-dependent robotics. Packaging, Palletizing, Bin Picking, Kitting, Grinding, deburring, milling, routing, drilling, Relieve workers from repetitive work and heavy lifting by automating palletizing with lightweight collaborative robot arms, Collaborative robots can handle Arc, TIG, laser, MIG, ultrasonic, plasma, and spot welding, as well as soldering and brazing. It is based on the principle of change in voltage difference for a change in temperature this change in voltage will provide the equivalent temperature value of the surrounding. 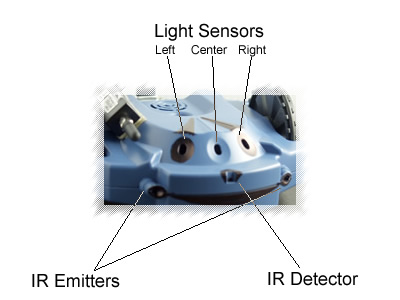{kind=link} It works on the concept of a voltage differential change for a temperature change; this voltage change provides the equivalent temperature of the surrounding area. types robot sensors sensor javatpoint robotics proximity Solar photovoltaic cells turn sunlight into electricity. They are widely used to quantify pressure. There are many different types of proximity sensors, but only a few are commonly employed in robots. I can withdraw my consent anytime to by contacting dataprotection@universal-robots.com . This sensor will also improve the assembling process for troubleshooting. Infrared (IR) Transceivers - In IR sensor LED transmit the beam of IR light and if it find an obstacle then the light is reflected back which is captured by an IR receiver. No, keep it, Universal Robots A/S
A force torque sensor gives the robotic arms the feel of completing an assembly task; internal state sensors are used for measuring the end effector. are rarely used. Ultrasound sensors could be used to measure distances as well. L293D is a cleverly packed IC which can control two DC motors in both directions: forwards and reverse. In general ultrasonic sensors are used for distance measurement in robotic system. Even a simple LED can act as a voltage sensor which can detect a voltage difference and light up. These sensors help create a feel-and-see feature in them, which provides the effortless accomplishment of various tasks. As a result, the amount of light received in the area can be utilized to determine whether or not neighboring objects are present. They include: A velocity or speed sensor measures consecutive position measurements at known intervals and computes the time rate of change in the position values. As the name suggests, pressure sensor measures pressure. There are hundreds of sensors available now that can sense practically anything you can imagine, and its nearly hard to list them all. Photoresistor is a type of resistor whose resistance varies with change in light intensity; more light leads to less resistance and less light leads to more resistance. Contact Sensors can be easily implemented, but the drawback is that they require physical contact. Universal Robots collaborative robot arms are used to boost performance and add value in countless industries every day. A great step-by-step tutorial on building your own Atmel AVR based Atmega8 development board. Sound sensors are more difficult to implement than light sensors as they produce a very small voltage difference that must be amplified to produce a discernible voltage change.
It works on the concept of a voltage differential change for a temperature change; this voltage change provides the equivalent temperature of the surrounding area. types robot sensors sensor javatpoint robotics proximity Solar photovoltaic cells turn sunlight into electricity. They are widely used to quantify pressure. There are many different types of proximity sensors, but only a few are commonly employed in robots. I can withdraw my consent anytime to by contacting dataprotection@universal-robots.com . This sensor will also improve the assembling process for troubleshooting. Infrared (IR) Transceivers - In IR sensor LED transmit the beam of IR light and if it find an obstacle then the light is reflected back which is captured by an IR receiver. No, keep it, Universal Robots A/S
A force torque sensor gives the robotic arms the feel of completing an assembly task; internal state sensors are used for measuring the end effector. are rarely used. Ultrasound sensors could be used to measure distances as well. L293D is a cleverly packed IC which can control two DC motors in both directions: forwards and reverse. In general ultrasonic sensors are used for distance measurement in robotic system. Even a simple LED can act as a voltage sensor which can detect a voltage difference and light up. These sensors help create a feel-and-see feature in them, which provides the effortless accomplishment of various tasks. As a result, the amount of light received in the area can be utilized to determine whether or not neighboring objects are present. They include: A velocity or speed sensor measures consecutive position measurements at known intervals and computes the time rate of change in the position values. As the name suggests, pressure sensor measures pressure. There are hundreds of sensors available now that can sense practically anything you can imagine, and its nearly hard to list them all. Photoresistor is a type of resistor whose resistance varies with change in light intensity; more light leads to less resistance and less light leads to more resistance. Contact Sensors can be easily implemented, but the drawback is that they require physical contact. Universal Robots collaborative robot arms are used to boost performance and add value in countless industries every day. A great step-by-step tutorial on building your own Atmel AVR based Atmega8 development board. Sound sensors are more difficult to implement than light sensors as they produce a very small voltage difference that must be amplified to produce a discernible voltage change. Most of the voltage outputs of current sensors are in the range of 0V to 5V.
This creates a trigger for the robot to act accordingly. Temperature sensors are widely used in robots working in extreme weather conditions, like a desert or an ice glacier. sales@universal-robots.com, Robotics technology is becoming more prominent day by day. sensor robot mobile types introduction systems equipped various window opens robotics As a result, the amount of light received in the area can be utilized to determine whether or not neighboring objects are present. Photoresistors and Photovoltaic cells are the two most used light sensors in robots. A tactile sensor is a device that determines whether or not an object is in contact. These sensors help robots react to the commands received. Photoresistor: Although a photoresistor is a light sensor, it can also be used as a proximity sensor. They are widely used for avoiding obstacles. In this article, we will learn about various sensors used in robotics. This is especially helpful if you are planning to build a solar robot. The two main light sensors generally used in robots are Photoresistor and Photovoltaic cells. The position sensors in robots are used to detect their positions.
Sound: The presence, frequency, and intensity of sound. Yes, change language There are different type of sensors are available to choose from and the characteristics of sensors are used for determining the type of sensor to be used for particular application. Tiny sensor ICs produce voltage differences to adjust to temperature changes. A single operation may necessitate the use of. This is a type of sensor which can detect the presence of a nearby object within a given distance, without any physical contact.
Light sensors are used to identify the light and generate a voltage difference. This is something that can be detected and dealt with. Copyright EVS TECH CO., LTD All rights reserved.All materials not authorized may not be redirected or for other usages. These sensors are used to monitor applications and interact with the environment in a gentle manner. It is used in simple robots that can navigate with the help of sound. Learning their characteristics helps us understand their usage. There are different types of sensors in robotics to pick from, and well go over the properties of a number of them, as well as why and where theyre employed. Vision-enabled insertion robots can precisely perform fitting and insertion operations of machine parts. types robot sensors sensor javatpoint robotics temperature A single task may require a combination of different sensors, or different tasks can be achieved using a single sensor. sensors robot robotic types sensing uses importance robotics sciences build A contact sensor is used in a limit switch, button switch, or tactile bumper switch. Heat: The wavelength of infrared or ultra violet rays, temperature, magnitude, direction. The three most common navigation sensors include; The Global Positioning System (GPS) is the most widely used positioning sensor. There are two kinds of forces which can affect an accelerometer: Static force and Dynamic Force. They are used to measure position, velocity and acceleration of the robot joint or end effectors. : Although a photoresistor is a light sensor, it can also be used as a proximity sensor. Object Proximity: The presence/absence of an object, bearing, color, distance between objects. Download software, manuals, and other documentation to keep your robot up to date with the latest features. These inexpensive sensors can be easily implemented in most light dependant robots. Few IMUs go a step further and combine a GPS device providing positional feedback. Contact sensors are those which require physical contact against other objects to trigger. The usage of robots, as a whole or parts like an arm, has significantly increased.. Change the cost equation with our low-risk financial service and accelerate automation without increasing capital expenditures. , or several jobs may be accomplished with a single sensor. There are different types of Proximity sensors and we will discuss only a few of them which are generally used in robots. {kind=link} While a photovoltaic cell can be considered an energy source, it can also be converted into a sensor with the use of transistors and capacitors. A proximity sensor in robotics can detect a nearby object without requiring physical touch. Copyright 2010 - 2022 ROBOT PLATFORM All Rights Reserved, Accelerometer Swing: 1.5g, 2g, 4g, 8g, 16g, Sensitivity: Higher or Lower (Higher the better). GPS - It is beneficial for outdoor robots. To achieve reliable solutions with efficient calibre, quick response, accuracy, and cost-effectiveness, we need to incorporate many sensors in robots. Some factors need to be considered before selecting accelerometer is: Consider the schematic diagram of basic accelerometer: JavaTpoint offers too many high quality services. Robots require extensive information about their environment in order to function effectively. One example is a general Operational-Amplifier (Op-Amp) which accepts a low voltage, amplifies it, and generates a higher voltage output. Most current sensors output an analog voltage between 0V to 5V which can be processed further using a microcontroller. There are two types of light sensors used in robot parts- photoresistors and photovoltaic cells. Light sensor is a transducer used for detecting light and creates a voltage difference equivalent to the light intensity fall on a light sensor. Positioning sensors are used to approximate the position of a robot, some for indoor positioning and few others for outdoor positioning. No. *This box is mandatory if you request content from Universal Robots, as we sell through a distributor network. 2D & 3D Vision: A two-dimensional computer vision image is flat, scaled to calculate length and width but not height. The commonly used position sensors are: This sensor helps to measure the tilt as well as the acceleration. Widely used as light sensors, photoresistors can also be used as proximity sensors due to their features. sensors instructables scurries bot bridge concept master Consider the types of proximity sensors used in robotics are:-. Consider the sound sensor based switching circuit: Temperature sensors are used for sensing the change in temperature of the surrounding. Gas sensors are made to detect specific gases. Their functioning depends mainly on the transduction principle. pressure sensors sensor load force cell b354 robotic applications application custom low sheet data This is particularly useful for developing a solar robot. Simple Force: Measuring force along a single axis. The more complicated your robot becomes, the more sensors it will have. This force is used to understand how exactly a robot tilts. Tactile is a robot sensor that is used to measure force and pressure with the help of touch. Robots need suitable sensors that help them control themselves. In other words, a Gyro is used to measure the rate of rotation around a particular axis. Developed by JavaTpoint. A single operation may necessitate the use of multiple sensors, or several jobs may be accomplished with a single sensor. You can think about anything and incorporate the senses in your robot with the specifically made sensors. robot sensors ir robotics sensor infrared Consider the PCB board layout of IR Transceiver circuit: Ultrasonic Sensor - In ultrasonic sensors high frequency sound waves is generated by transmitter, the received echo pulse suggests an object interruption.
While a photovoltaic cell can be considered an energy source, it can also be converted into a sensor with the use of transistors and capacitors. A proximity sensor in robotics can detect a nearby object without requiring physical touch. Copyright 2010 - 2022 ROBOT PLATFORM All Rights Reserved, Accelerometer Swing: 1.5g, 2g, 4g, 8g, 16g, Sensitivity: Higher or Lower (Higher the better). GPS - It is beneficial for outdoor robots. To achieve reliable solutions with efficient calibre, quick response, accuracy, and cost-effectiveness, we need to incorporate many sensors in robots. Some factors need to be considered before selecting accelerometer is: Consider the schematic diagram of basic accelerometer: JavaTpoint offers too many high quality services. Robots require extensive information about their environment in order to function effectively. One example is a general Operational-Amplifier (Op-Amp) which accepts a low voltage, amplifies it, and generates a higher voltage output. Most current sensors output an analog voltage between 0V to 5V which can be processed further using a microcontroller. There are two types of light sensors used in robot parts- photoresistors and photovoltaic cells. Light sensor is a transducer used for detecting light and creates a voltage difference equivalent to the light intensity fall on a light sensor. Positioning sensors are used to approximate the position of a robot, some for indoor positioning and few others for outdoor positioning. No. *This box is mandatory if you request content from Universal Robots, as we sell through a distributor network. 2D & 3D Vision: A two-dimensional computer vision image is flat, scaled to calculate length and width but not height. The commonly used position sensors are: This sensor helps to measure the tilt as well as the acceleration. Widely used as light sensors, photoresistors can also be used as proximity sensors due to their features. sensors instructables scurries bot bridge concept master Consider the types of proximity sensors used in robotics are:-. Consider the sound sensor based switching circuit: Temperature sensors are used for sensing the change in temperature of the surrounding. Gas sensors are made to detect specific gases. Their functioning depends mainly on the transduction principle. pressure sensors sensor load force cell b354 robotic applications application custom low sheet data This is particularly useful for developing a solar robot. Simple Force: Measuring force along a single axis. The more complicated your robot becomes, the more sensors it will have. This force is used to understand how exactly a robot tilts. Tactile is a robot sensor that is used to measure force and pressure with the help of touch. Robots need suitable sensors that help them control themselves. In other words, a Gyro is used to measure the rate of rotation around a particular axis. Developed by JavaTpoint. A single operation may necessitate the use of multiple sensors, or several jobs may be accomplished with a single sensor. You can think about anything and incorporate the senses in your robot with the specifically made sensors. robot sensors ir robotics sensor infrared Consider the PCB board layout of IR Transceiver circuit: Ultrasonic Sensor - In ultrasonic sensors high frequency sound waves is generated by transmitter, the received echo pulse suggests an object interruption.
{kind=link}
{kind=link}
{kind=link}